UGV製作
今回は、GPSで自動的に移動する、UGVを製作します。UGV(Unmanned Ground Vehicle)は、UAV(Unmanned Air Vehicle)の地上版で、完全無人です。
もちろん、マイコンなどを使用して、プログラミングを行います。目標は、数kmを自立移動させることです。
説明
上の説明にあるように、要するに製作するのはコイルガン戦車とほぼ同じような物となることが分かると思います。
大きさ的には、およそ300mm四方以内に収まる予定で、プログラムされた座標に自立移動し、一部では人間のコントロールによって操作する予定です。
で、なぜこれを作ろうと思ったかといいますと、まずティルトロータ型UAV製作の構想があり、これは調べていくうちに材料費や制御、重量や機体設計が複雑すぎて、私の様な者には向かないことが分かりました。そこで、ひとまず地上での移動であれば、重量の制限などもある程度無視でき、どんな形でもいいので、UGVとなったのです。
他にも色々と要因がありましたが(笑)
今回製作するUGVの性能は、次のような物が求められています。
・移動中に人の手を介さず、プログラミングされた地点まで自立移動すること。
・複雑な地形でも可能な限り移動ができること。
・GPSによって誘導し、人の手でも操作できること。
・なるべく小型。
おおよそこのような物で、初期のUGVの形は、コイルガン戦車の砲塔部分が無いようなキャタピラ車両でしたが、次第に妄想構想が膨らんでいき、多脚型となりました(笑)
多脚型の場合、不整地での走破性は良好で、プログラミングでの制御も、モータの回転数を制御しなくていいので簡単です。ただ、バランスが悪くなったり、移動が遅い欠点があります。
そこで、脚の先にタイヤを付け、高速走行をできるようにしようと考えています。まあ、タチコマ風といえば分かりやすいでしょうか(笑)
そんなわけで、製作に入ります。
2010/05/19
基本的な構造を考え、秋月電子に注文していた部品が届きました。

およそ15000円。サーボひとつが1000円で、それが八個なので凄まじい値段に(笑)
・サーボモータ

・マイコン(H8/3694F)

・GPSユニット

・USBシリアル変換コネクタ
買ったのは主にこんなもの。サーボモータは、ロボットの関節に使用、マイコンはGPSからのデータを受け取り、指定された座標との比較、サーボへの命令などを行います。
GPSユニットは言わずとも分かるとおり、衛星から電波を受信して、現在座標を送信します。
GPS(Global Positioning System)は米国が打ち上げた約30(24だったような……)の衛星からの電波を受信し、地球上の位置を知るシステムです。
ご存知の方も多いように、元々は軍用に開発されたシステムです。そのため精度は最大誤差10cm程と、驚異のシステムとなっています。
ですが、これは軍用のPコードでの話でして、実際民間で使用可能なC/Aコードでは、10mほどの誤差があります。
脱線しまくりましたね(笑)
USBシリアル変換コネクタは、PCのUSBコネクタをRS232Cという規格のコネクタに変換する物です。これがないと、マイコンと通信ができません。
さて、サーボモータですが、これはギアボックスとモータが一体になったようなものです。普通のギアボックスとの違いは、信号によって角度を決め、それを保持できることです。
で、二足以上での歩行ロボットの場合、図のように足の関節は三つ必要となります。
つまり、それだけモータが必要となります。今回の場合四足なので、12個必要となります。
ですが、このサーボは高いのです。高トルクの物が必要なのですが、安いものでも5000円とかしたりします。勿論一つです。
そのため、サーボだけで60000円など飛びますので、このサイトの方針(なるべく安く収める)としてはよろしくありません。というか金がありません(笑)
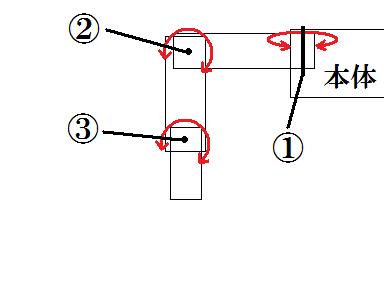
という訳で、今回は本で調べた方式として、下の図の様な形にします。
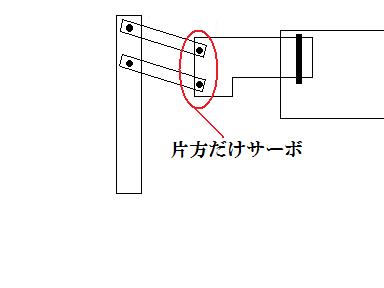
このようにすることで、足が常に垂直に地面に着くようになります。
今回はこのような方式で製作するので、サーボは8個で足ります。秋月電子で安く高トルクのサーボを発見したので、最終的にはサーボだけでおよそ8000円となりました。
2010/6/26
この間、なぜか一ヶ月以上ブランクが(笑)
ひとまず、ボディとなる塩ビ板を切断して加工し、サーボを取り付けました。
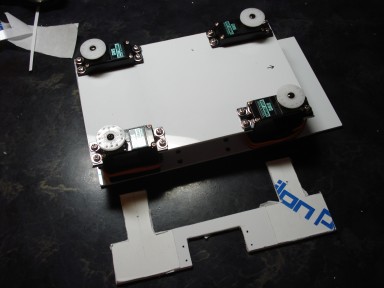
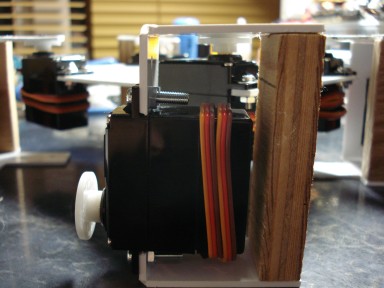
このサーボは、脚を水平方向に動かすためのもので、ねじで塩ビ板に固定してあります。
前方に転がっている部品は、脚を垂直方向に動かすためのサーボを固定するための部品で、まだ切り出しただけの状態。
サーボはこんな感じで固定されます。

折り曲げた塩ビ板が、どれほどの強度を持つかはまだわからないので、結構不安だったり。
2010/7/3
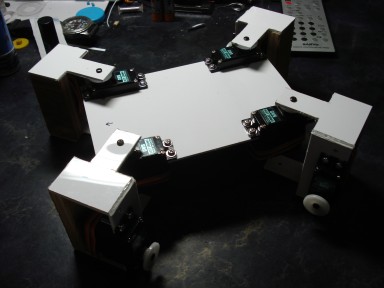
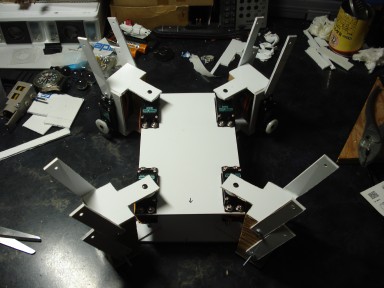
前述の部品を同じ寸法で合計四つ切り出し、サーボや、補強の合板を取り付けました。
それにしても、アクリルカッターで垂直の角や、細かいところを加工するのは凄まじく大変で、めんどくさいし疲れることこの上ないです。なのでこれ以降は、不要になったカッターの刃をバーナーで炙って、切断もとい溶断する作戦に移行。切断面が炭化したりしますが気のせいです。

裏はこんな感じに、殺風景。軸用のねじが出てるぐらいでしょうか。やたら開いてる穴は、マイコン取り付け用の穴です。二つほどミスりました。
折り曲げた部品の補強には、以前楽器で使用した合板の残りを使用。
スペースはぎりぎりです。
2010/9/18
テストやらいろいろあり、数か月作業がとどこおっていましたが、ひとまず脚を上下に動かすための棒を取り付けました。
このときは、サーボを取り付ける側にも、板を取り付けていましたが、あまりスムーズに動かないので、あとで取り外しています。
それから、ギアボックス、キャタピラなどを取り付ける合板を取り付け、立たせたりしてみました。
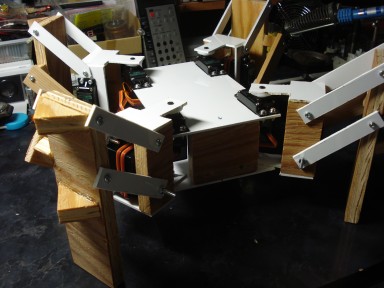
写真で合板に付いている三角形の物は、キャタピラを進行方向に合わせるため、角度を付ける物です。
それから、キャタピラを付けました。


脚を収縮したときに、車体底面と地面の隙間が、20mmになるように設置しました。この後、モータを繋ぎ走行試験をしてみましたが、キャタピラがフニャっとなり脱輪。そのため、タイヤ方式に比較的早く計画変更となりました(笑)
2010/11/29
この間、東京行ったり、秋月電子行ったりしてました。
さて、ここにきてコイルガンの製作です(笑)
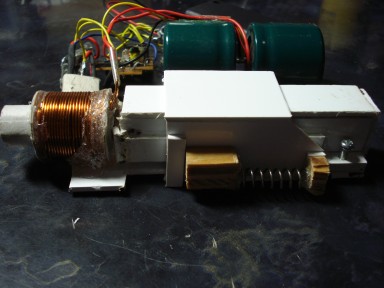
以前製作した、効率4%のコイルガンです。これは今までの2.5mmの物ではなく、14mmの鉄球を使用します。
このユニットの横に付いているスプリングは、初搭載の駐退機です。駐退機とは、砲などで発射時の衝撃を吸収するために、砲身自体がバックする機構です。
また、この鉄球専用のマガジンも製作を行いました。
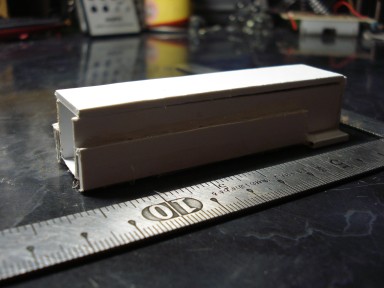
こちらも、スプリング式マガジンで、初製作です。弾は予定より少なく、3発搭載可能です。長さ的には5発入るのですが、ミスりまくったのでかなり少ないです()
これらを何に使うかは予想通りですね(((
2011/01/07
あっという間に年が明けてしまいました()このプロジェクトは、数年越しになりそうです。
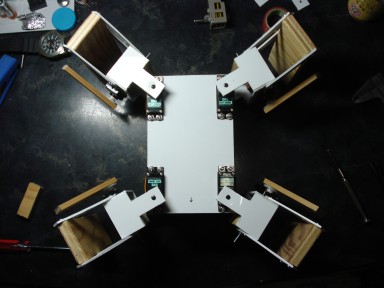
キャタピラ式の試験を少し前に行い、見事脱輪したので、タイヤに換装してみました。

今回も、床との隙間は20mmになるようにしてあります。そういえば、このサイトで製作してきた物で、タイヤ式の物は初めてなんじゃないでしょうか。このUGVは、いろいろと初めての要素が多いです。
実験室に戻る
